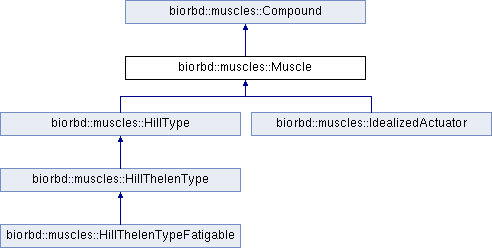
Base class of all muscle. More...
#include <Muscle.h>
Public Member Functions | |
| Muscle () | |
| Construct a muscle. | |
| Muscle (const biorbd::utils::String &name, const biorbd::muscles::Geometry &position, const biorbd::muscles::Characteristics &characteristics) | |
| Construct a muscle. More... | |
| Muscle (const biorbd::utils::String &name, const biorbd::muscles::Geometry &position, const biorbd::muscles::Characteristics &characteristics, const biorbd::muscles::State &emg) | |
| Construct a muscle. More... | |
| Muscle (const biorbd::utils::String &name, const biorbd::muscles::Geometry &position, const biorbd::muscles::Characteristics &characteristics, const biorbd::muscles::PathModifiers &pathModifiers) | |
| Construct a muscle. More... | |
| Muscle (const biorbd::utils::String &name, const biorbd::muscles::Geometry &position, const biorbd::muscles::Characteristics &characteristics, const biorbd::muscles::PathModifiers &pathModifiers, const biorbd::muscles::State &emg) | |
| Construct a muscle. More... | |
| Muscle (const biorbd::muscles::Muscle &other) | |
| Construct a muscle from another muscle. More... | |
| Muscle (const std::shared_ptr< biorbd::muscles::Muscle > other) | |
| Construct a muscle from another muscle. More... | |
| virtual | ~Muscle () |
| Destroy class properly. | |
| void | DeepCopy (const biorbd::muscles::Muscle &other) |
| Deep copy of a muscle in new muscle. More... | |
| const biorbd::utils::Scalar & | length (biorbd::rigidbody::Joints &model, const biorbd::rigidbody::GeneralizedCoordinates &Q, int updateKin=2) |
| Get the length of the muscle. More... | |
| const biorbd::utils::Scalar & | musculoTendonLength (biorbd::rigidbody::Joints &model, const biorbd::rigidbody::GeneralizedCoordinates &Q, int updateKin=2) |
| Return the musculo tendon length. More... | |
| const biorbd::utils::Scalar & | velocity (biorbd::rigidbody::Joints &model, const biorbd::rigidbody::GeneralizedCoordinates &Q, const biorbd::rigidbody::GeneralizedVelocity &Qdot, bool updateKin=true) |
| Return the velocity of the muscle. More... | |
| void | updateOrientations (biorbd::rigidbody::Joints &model, const biorbd::rigidbody::GeneralizedCoordinates &Q, int updateKin=2) |
| Update the position of the origin and insertion positions of the muscle. More... | |
| void | updateOrientations (biorbd::rigidbody::Joints &model, const biorbd::rigidbody::GeneralizedCoordinates &Q, const biorbd::rigidbody::GeneralizedVelocity &Qdot, int updateKin=2) |
| Update the position of the origin and insertion nodes of the muscle. More... | |
| void | updateOrientations (std::vector< biorbd::utils::Vector3d > &musclePointsInGlobal, biorbd::utils::Matrix &jacoPointsInGlobal) |
| Update by hand the position of the origin and insertion nodes of the muscle. More... | |
| void | updateOrientations (std::vector< biorbd::utils::Vector3d > &musclePointsInGlobal, biorbd::utils::Matrix &jacoPointsInGlobal, const biorbd::rigidbody::GeneralizedVelocity &Qdot) |
| Update by hand the position of the origin and insertion nodes of the muscle. More... | |
| void | setPosition (const biorbd::muscles::Geometry &positions) |
| Set the position of all the points attached to the muscle (0 being the origin) More... | |
| const biorbd::muscles::Geometry & | position () const |
| Return the position of all the points attached to the muscle (0 being the origin) More... | |
| void | setCharacteristics (const biorbd::muscles::Characteristics &characteristics) |
| Set the muscle characteristics. More... | |
| const biorbd::muscles::Characteristics & | characteristics () const |
| Return the muscle characteristics. More... | |
| const std::vector< biorbd::utils::Vector3d > & | musclesPointsInGlobal (biorbd::rigidbody::Joints &model, const biorbd::rigidbody::GeneralizedCoordinates &Q) |
| Return the muscle points in global reference frame. More... | |
| const std::vector< biorbd::utils::Vector3d > & | musclesPointsInGlobal () const |
| Return the previously computed muscle points in global reference frame. More... | |
| void | setForceIsoMax (const biorbd::utils::Scalar &forceMax) |
| Set the maximal isometric force. More... | |
| void | setState (const biorbd::muscles::State &emg) |
| Set the dynamic state. More... | |
| const biorbd::muscles::State & | state () const |
| Return the dynamic state. More... | |
| biorbd::muscles::State & | state () |
| Return the dynamic state. More... | |
| const biorbd::utils::Scalar & | activationDot (const biorbd::muscles::State &state, bool alreadyNormalized=false) const |
| Return the activation time derivative. More... | |
 Public Member Functions inherited from biorbd::muscles::Compound Public Member Functions inherited from biorbd::muscles::Compound | |
| Compound () | |
| Construct muscle compound. | |
| Compound (const biorbd::utils::String &name) | |
| Construct compound. More... | |
| Compound (const biorbd::utils::String &name, const biorbd::muscles::PathModifiers &pathModifiers) | |
| Construct compound. More... | |
| Compound (const biorbd::muscles::Compound &other) | |
| Construct compound from another muscle. More... | |
| Compound (const std::shared_ptr< biorbd::muscles::Compound > other) | |
| Construct compound from another muscle. More... | |
| virtual | ~Compound () |
| Destroy class properly. | |
| void | DeepCopy (const biorbd::muscles::Compound &other) |
| Deep copy of a compound. More... | |
| void | setName (const biorbd::utils::String &name) |
| Set the name of a muscle. More... | |
| const biorbd::utils::String & | name () const |
| Return the name of the muscle. More... | |
| biorbd::muscles::MUSCLE_TYPE | type () const |
| Return the type of the muscle. More... | |
| const biorbd::muscles::PathModifiers & | pathModifier () |
| Return the path modifier. More... | |
| void | addPathObject (biorbd::utils::Vector3d &wrap) |
| Add a path modifier object. More... | |
| virtual const biorbd::utils::Scalar & | force () |
| Return the last computed muscle force norm. More... | |
| virtual const biorbd::utils::Scalar & | force (const biorbd::muscles::State &emg)=0 |
| Computes and returns the forces norm from the EMG. More... | |
| virtual const biorbd::utils::Scalar & | force (biorbd::rigidbody::Joints &model, const biorbd::rigidbody::GeneralizedCoordinates &Q, const biorbd::rigidbody::GeneralizedVelocity &Qdot, const biorbd::muscles::State &emg, int updateKin=2)=0 |
| Return the computed force norm from EMG. More... | |
| virtual const biorbd::utils::Scalar & | force (biorbd::rigidbody::Joints &model, const biorbd::rigidbody::GeneralizedCoordinates &Q, const biorbd::muscles::State &emg, int updateKin=2)=0 |
| Return the computed force norm from EMG. More... | |
Protected Member Functions | |
| virtual void | computeForce (const biorbd::muscles::State &emg) |
| Computer the forces from a specific emg. More... | |
| virtual biorbd::utils::Scalar | getForceFromActivation (const biorbd::muscles::State &emg)=0 |
| Function allowing modification of the way the multiplication is done in computeForce(EMG) More... | |
| Protected Member Functions inherited from biorbd::muscles::Compound | |
| virtual void | setType ()=0 |
| Set the type of muscle. | |
Protected Attributes | |
| std::shared_ptr< biorbd::muscles::Geometry > | m_position |
| The position of all the nodes of the muscle (0 being the origin and last being insertion. | |
| std::shared_ptr< biorbd::muscles::Characteristics > | m_characteristics |
| The muscle characteristics. | |
| std::shared_ptr< biorbd::muscles::State > | m_state |
| The dynamic state. | |
| Protected Attributes inherited from biorbd::muscles::Compound | |
| std::shared_ptr< biorbd::utils::String > | m_name |
| The name of the muscle. | |
| std::shared_ptr< biorbd::muscles::MUSCLE_TYPE > | m_type |
| The type of muscle. | |
| std::shared_ptr< biorbd::muscles::PathModifiers > | m_pathChanger |
| The set of path modifiers. | |
| std::shared_ptr< biorbd::utils::Scalar > | m_force |
| The last computed force. | |
Detailed Description
Constructor & Destructor Documentation
◆ Muscle() [1/6]
| biorbd::muscles::Muscle::Muscle | ( | const biorbd::utils::String & | name, |
| const biorbd::muscles::Geometry & | position, | ||
| const biorbd::muscles::Characteristics & | characteristics | ||
| ) |
Construct a muscle.
- Parameters
-
name Name of the muscle position Position of the origin/insertion characteristics Muscle characteristics from an initial state
Definition at line 24 of file Muscle.cpp.
◆ Muscle() [2/6]
| biorbd::muscles::Muscle::Muscle | ( | const biorbd::utils::String & | name, |
| const biorbd::muscles::Geometry & | position, | ||
| const biorbd::muscles::Characteristics & | characteristics, | ||
| const biorbd::muscles::State & | emg | ||
| ) |
Construct a muscle.
- Parameters
-
name Name of the muscle position Position of the origin/insertion characteristics Muscle characteristics from an initial state emg Dynamic state
Definition at line 36 of file Muscle.cpp.
◆ Muscle() [3/6]
| biorbd::muscles::Muscle::Muscle | ( | const biorbd::utils::String & | name, |
| const biorbd::muscles::Geometry & | position, | ||
| const biorbd::muscles::Characteristics & | characteristics, | ||
| const biorbd::muscles::PathModifiers & | pathModifiers | ||
| ) |
Construct a muscle.
- Parameters
-
name Name of the muscle position Position of the origin/insertion characteristics Muscle characteristics from an initial state pathModifiers The path modifiers
Definition at line 49 of file Muscle.cpp.
◆ Muscle() [4/6]
| biorbd::muscles::Muscle::Muscle | ( | const biorbd::utils::String & | name, |
| const biorbd::muscles::Geometry & | position, | ||
| const biorbd::muscles::Characteristics & | characteristics, | ||
| const biorbd::muscles::PathModifiers & | pathModifiers, | ||
| const biorbd::muscles::State & | emg | ||
| ) |
Construct a muscle.
- Parameters
-
name Name of the muscle position Position of the origin/insertion characteristics Muscle characteristics from an initial state pathModifiers The path modifier emg The dynamic state
Definition at line 80 of file Muscle.cpp.
◆ Muscle() [5/6]
| biorbd::muscles::Muscle::Muscle | ( | const biorbd::muscles::Muscle & | other | ) |
Construct a muscle from another muscle.
- Parameters
-
other The other muscle
Definition at line 62 of file Muscle.cpp.
◆ Muscle() [6/6]
| biorbd::muscles::Muscle::Muscle | ( | const std::shared_ptr< biorbd::muscles::Muscle > | other | ) |
Construct a muscle from another muscle.
- Parameters
-
other The other muscle
Definition at line 71 of file Muscle.cpp.
Member Function Documentation
◆ activationDot()
| const biorbd::utils::Scalar & biorbd::muscles::Muscle::activationDot | ( | const biorbd::muscles::State & | state, |
| bool | alreadyNormalized = false |
||
| ) | const |
Return the activation time derivative.
- Parameters
-
state The dynamic state alreadyNormalized If the emg is already normalized
- Returns
- The activation time derivative
Definition at line 189 of file Muscle.cpp.
◆ characteristics()
| const biorbd::muscles::Characteristics & biorbd::muscles::Muscle::characteristics | ( | ) | const |
Return the muscle characteristics.
- Returns
- The muscle characteristics
Definition at line 232 of file Muscle.cpp.
◆ computeForce()
|
protectedvirtual |
Computer the forces from a specific emg.
- Parameters
-
emg EMG data
Definition at line 202 of file Muscle.cpp.
◆ DeepCopy()
| void biorbd::muscles::Muscle::DeepCopy | ( | const biorbd::muscles::Muscle & | other | ) |
Deep copy of a muscle in new muscle.
- Parameters
-
other The muscle to copy
Definition at line 100 of file Muscle.cpp.
◆ getForceFromActivation()
|
protectedpure virtual |
Function allowing modification of the way the multiplication is done in computeForce(EMG)
- Parameters
-
emg The EMG data
- Returns
- The force from activation
Implemented in biorbd::muscles::HillType, and biorbd::muscles::IdealizedActuator.
◆ length()
| const biorbd::utils::Scalar & biorbd::muscles::Muscle::length | ( | biorbd::rigidbody::Joints & | model, |
| const biorbd::rigidbody::GeneralizedCoordinates & | Q, | ||
| int | updateKin = 2 |
||
| ) |
Get the length of the muscle.
- Parameters
-
model The joint model Q The generalized coordinates updateKin Update kinematics (0: don't update, 1:only muscles, [2: both kinematics and muscles])
- Returns
- The length of the muscle
Definition at line 149 of file Muscle.cpp.
◆ musclesPointsInGlobal() [1/2]
| const std::vector< biorbd::utils::Vector3d > & biorbd::muscles::Muscle::musclesPointsInGlobal | ( | ) | const |
Return the previously computed muscle points in global reference frame.
- Returns
- The muscle points in global reference frame
Definition at line 216 of file Muscle.cpp.
◆ musclesPointsInGlobal() [2/2]
| const std::vector< biorbd::utils::Vector3d > & biorbd::muscles::Muscle::musclesPointsInGlobal | ( | biorbd::rigidbody::Joints & | model, |
| const biorbd::rigidbody::GeneralizedCoordinates & | Q | ||
| ) |
Return the muscle points in global reference frame.
- Parameters
-
model The joint model Q The generalized coordinates
- Returns
- The muscle points in global reference frame
Definition at line 207 of file Muscle.cpp.
◆ musculoTendonLength()
| const biorbd::utils::Scalar & biorbd::muscles::Muscle::musculoTendonLength | ( | biorbd::rigidbody::Joints & | model, |
| const biorbd::rigidbody::GeneralizedCoordinates & | Q, | ||
| int | updateKin = 2 |
||
| ) |
Return the musculo tendon length.
- Parameters
-
model The joint model Q The generalized coordinates updateKin Update kinematics (0: don't update, 1:only muscles, [2: both kinematics and muscles])
- Returns
- The musculo tendon length
Definition at line 162 of file Muscle.cpp.
◆ position()
| const biorbd::muscles::Geometry & biorbd::muscles::Muscle::position | ( | ) | const |
Return the position of all the points attached to the muscle (0 being the origin)
- Returns
- The positions
Definition at line 145 of file Muscle.cpp.
◆ setCharacteristics()
| void biorbd::muscles::Muscle::setCharacteristics | ( | const biorbd::muscles::Characteristics & | characteristics | ) |
Set the muscle characteristics.
- Parameters
-
characteristics New value of the muscle characteristics
Definition at line 227 of file Muscle.cpp.
◆ setForceIsoMax()
| void biorbd::muscles::Muscle::setForceIsoMax | ( | const biorbd::utils::Scalar & | forceMax | ) |
Set the maximal isometric force.
- Parameters
-
forceMax The force to set
Definition at line 221 of file Muscle.cpp.
◆ setPosition()
| void biorbd::muscles::Muscle::setPosition | ( | const biorbd::muscles::Geometry & | positions | ) |
Set the position of all the points attached to the muscle (0 being the origin)
- Parameters
-
positions New value of the position
Definition at line 140 of file Muscle.cpp.
◆ setState()
| void biorbd::muscles::Muscle::setState | ( | const biorbd::muscles::State & | emg | ) |
Set the dynamic state.
- Parameters
-
emg The dynamic state value
Definition at line 238 of file Muscle.cpp.
◆ state() [1/2]
| biorbd::muscles::State & biorbd::muscles::Muscle::state | ( | ) |
◆ state() [2/2]
| const biorbd::muscles::State & biorbd::muscles::Muscle::state | ( | ) | const |
◆ updateOrientations() [1/4]
| void biorbd::muscles::Muscle::updateOrientations | ( | biorbd::rigidbody::Joints & | model, |
| const biorbd::rigidbody::GeneralizedCoordinates & | Q, | ||
| const biorbd::rigidbody::GeneralizedVelocity & | Qdot, | ||
| int | updateKin = 2 |
||
| ) |
Update the position of the origin and insertion nodes of the muscle.
- Parameters
-
model The joint model Q The generalized coordinates Qdot The generalized velocities updateKin Update kinematics (0: don't update, 1:only muscles, [2: both kinematics and muscles])
Definition at line 116 of file Muscle.cpp.
◆ updateOrientations() [2/4]
| void biorbd::muscles::Muscle::updateOrientations | ( | biorbd::rigidbody::Joints & | model, |
| const biorbd::rigidbody::GeneralizedCoordinates & | Q, | ||
| int | updateKin = 2 |
||
| ) |
Update the position of the origin and insertion positions of the muscle.
- Parameters
-
model The joint model Q The generalized coordinates updateKin Update kinematics (0: don't update, 1:only muscles, [2: both kinematics and muscles])
Definition at line 108 of file Muscle.cpp.
◆ updateOrientations() [3/4]
| void biorbd::muscles::Muscle::updateOrientations | ( | std::vector< biorbd::utils::Vector3d > & | musclePointsInGlobal, |
| biorbd::utils::Matrix & | jacoPointsInGlobal | ||
| ) |
Update by hand the position of the origin and insertion nodes of the muscle.
- Parameters
-
musclePointsInGlobal The muscle points jacoPointsInGlobal The jacobian matrix
Definition at line 125 of file Muscle.cpp.
◆ updateOrientations() [4/4]
| void biorbd::muscles::Muscle::updateOrientations | ( | std::vector< biorbd::utils::Vector3d > & | musclePointsInGlobal, |
| biorbd::utils::Matrix & | jacoPointsInGlobal, | ||
| const biorbd::rigidbody::GeneralizedVelocity & | Qdot | ||
| ) |
Update by hand the position of the origin and insertion nodes of the muscle.
- Parameters
-
musclePointsInGlobal The muscle points jacoPointsInGlobal The Jacobian matrix Qdot The genelized velocities
Definition at line 131 of file Muscle.cpp.
◆ velocity()
| const biorbd::utils::Scalar & biorbd::muscles::Muscle::velocity | ( | biorbd::rigidbody::Joints & | model, |
| const biorbd::rigidbody::GeneralizedCoordinates & | Q, | ||
| const biorbd::rigidbody::GeneralizedVelocity & | Qdot, | ||
| bool | updateKin = true |
||
| ) |
Return the velocity of the muscle.
- Parameters
-
model The joint model Q The generalized coordinates Qdot The generalized velocities updateKin Update kinematics (0: don't update, 1:only muscles, [2: both kinematics and muscles])
- Returns
- The velocity of the muscle
Definition at line 175 of file Muscle.cpp.
The documentation for this class was generated from the following files:
