|
| | IMU (bool isTechnical=true, bool isAnatomical=true) |
| | Construct inertial measurement unit. More...
|
| |
| | IMU (const biorbd::utils::RotoTransNode &RotoTrans, bool isTechnical=true, bool isAnatomical=true) |
| | Construct inertial measurement unit data. More...
|
| |
| biorbd::rigidbody::IMU | DeepCopy () const |
| | Deep copy of the IMU data. More...
|
| |
| void | DeepCopy (const biorbd::rigidbody::IMU &other) |
| | Deep copy if the IMU data. More...
|
| |
| bool | isTechnical () const |
| | Return if the IMU is technical. More...
|
| |
| bool | isAnatomical () const |
| | Return if the IMU is anatomical. More...
|
| |
|
| RotoTransNode () |
| | Construct a RotoTransNode.
|
| |
| | RotoTransNode (const biorbd::utils::RotoTrans &rt, const biorbd::utils::String &name, const biorbd::utils::String &parentName) |
| | Construct a RotoTransNode. More...
|
| |
| biorbd::utils::RotoTransNode | DeepCopy () const |
| | Deep copy of a RotoTransNode. More...
|
| |
| void | DeepCopy (const biorbd::utils::RotoTransNode &other) |
| | Deep copy of a RotoTransNode into another RotoTransNode. More...
|
| |
| void | operator= (const biorbd::utils::RotoTrans &other) |
| | operator= Matrix multiplication More...
|
| |
| biorbd::utils::RotoTrans | operator* (const biorbd::utils::RotoTransNode &other) const |
| | operator* Matrix multiplication More...
|
| |
| | RotoTrans (const RigidBodyDynamics::Math::Matrix4d &matrix=RigidBodyDynamics::Math::Matrix4d::Identity()) |
| | Construct RotoTrans matrix. More...
|
| |
| | RotoTrans (const biorbd::utils::Scalar &v00, const biorbd::utils::Scalar &v01, const biorbd::utils::Scalar &v02, const biorbd::utils::Scalar &v03, const biorbd::utils::Scalar &v10, const biorbd::utils::Scalar &v11, const biorbd::utils::Scalar &v12, const biorbd::utils::Scalar &v13, const biorbd::utils::Scalar &v20, const biorbd::utils::Scalar &v21, const biorbd::utils::Scalar &v22, const biorbd::utils::Scalar &v23, const biorbd::utils::Scalar &v30, const biorbd::utils::Scalar &v31, const biorbd::utils::Scalar &v32, const biorbd::utils::Scalar &v33) |
| | RotoTrans Construct a RotoTrans matrix by elements. More...
|
| |
| | RotoTrans (const biorbd::utils::Rotation &rot) |
| | Contruct Rototrans. More...
|
| |
| | RotoTrans (const biorbd::utils::Rotation &rot, const biorbd::utils::Vector3d &trans) |
| | Contruct Rototrans. More...
|
| |
| | RotoTrans (const biorbd::utils::Vector &rotation, const biorbd::utils::Vector3d &translation, const biorbd::utils::String &rotationSequence) |
| | Contruct Rototrans. More...
|
| |
| | RotoTrans (const RigidBodyDynamics::Math::SpatialTransform &st) |
| | Contruct Rototrans. More...
|
| |
| biorbd::utils::Vector3d | axe (unsigned int idx) const |
| | Get a particular axis of the rotation matrix. More...
|
| |
| biorbd::utils::RotoTrans | transpose () const |
| | Return the tranposed matrix. More...
|
| |
| biorbd::utils::Vector3d | trans () const |
| | Return the translation vector. More...
|
| |
| biorbd::utils::Rotation | rot () const |
| | Return the rotation matrix. More...
|
| |
|
| Node () |
| | Construct Node.
|
| |
| | Node (const biorbd::utils::Node &other) |
| | Construct Node from another node. More...
|
| |
| | Node (const biorbd::utils::String &name) |
| | Construct Node. More...
|
| |
| | Node (const biorbd::utils::String &name, const biorbd::utils::String &parentName) |
| | Construct Node. More...
|
| |
|
virtual | ~Node () |
| | Destroy class properly.
|
| |
| void | DeepCopy (const biorbd::utils::Node &other) |
| | Deep copy of the node in another node. More...
|
| |
| void | setName (const biorbd::utils::String &name) |
| | Set the name of the node. More...
|
| |
|
const biorbd::utils::String & | name () const |
| | Return the name of the node.
|
| |
|
const biorbd::utils::String & | parent () const |
| | Return the parent name of the node.
|
| |
| void | setParent (const biorbd::utils::String &name) |
| | Set the parent name of the node. More...
|
| |
|
biorbd::utils::NODE_TYPE | typeOfNode () const |
| | Return the type of node.
|
| |
|
| static biorbd::utils::RotoTrans | fromMarkers (const biorbd::rigidbody::NodeSegment &origin, const std::pair< biorbd::rigidbody::NodeSegment, biorbd::rigidbody::NodeSegment > &axis1markers, const std::pair< biorbd::rigidbody::NodeSegment, biorbd::rigidbody::NodeSegment > &axis2markers, const std::pair< biorbd::utils::String, biorbd::utils::String > &axesNames, const biorbd::utils::String &axisToRecalculate) |
| | fromMarkers Creates a system of axes from two axes and an origin defined by markers More...
|
| |
| static biorbd::utils::RotoTrans | combineRotAndTrans (const biorbd::utils::Rotation &rot, const biorbd::utils::Vector3d &trans) |
| | Set the RotoTrans from a rotation and a translation. More...
|
| |
| static biorbd::utils::RotoTrans | fromSpatialTransform (const RigidBodyDynamics::Math::SpatialTransform &st) |
| | set the RotoTrans from a spatial transform More...
|
| |
| static biorbd::utils::RotoTrans | fromEulerAngles (const biorbd::utils::Vector &rot, const biorbd::utils::Vector3d &trans, const biorbd::utils::String &seq) |
| | Create a RotoTrans from Euler angles. More...
|
| |
| static biorbd::utils::Vector | toEulerAngles (const biorbd::utils::RotoTrans &rt, const biorbd::utils::String &seq) |
| | Return extracted angles from the rotation matrix into Euler angles using the provided sequence. More...
|
| |
| static biorbd::utils::RotoTrans | mean (const std::vector< biorbd::utils::RotoTrans > &rt) |
| | Get the mean of the 4x4 matrices. More...
|
| |
|
void | setType () |
| | Set the type to ROTOTRANS.
|
| |
| RigidBodyDynamics::Math::Vector4d | expand3dTo4d (const biorbd::utils::Vector3d &v1) |
| | Expand 3D vector to 4D (padding with an extra 1) More...
|
| |
| void | checkUnitary () |
| | Check if the RotoTrans has a unitary matrix of rotation and the last row is (0, 0, 0, 1) More...
|
| |
Class IMU.
Definition at line 21 of file IMU.h.
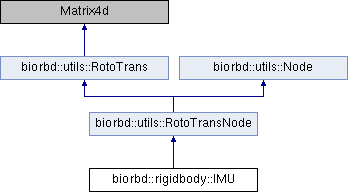
 Public Member Functions inherited from biorbd::utils::RotoTransNode
Public Member Functions inherited from biorbd::utils::RotoTransNode