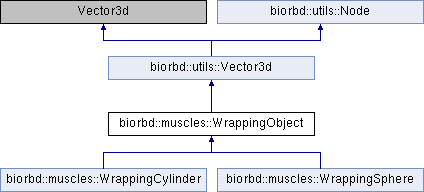
Base class for the wrapping objects. More...
#include <WrappingObject.h>
Public Member Functions | |
| WrappingObject () | |
| Construct a wrapping object. | |
| WrappingObject (const biorbd::utils::Scalar &x, const biorbd::utils::Scalar &y, const biorbd::utils::Scalar &z) | |
| Construct a wrapping object. More... | |
| WrappingObject (const biorbd::utils::Scalar &x, const biorbd::utils::Scalar &y, const biorbd::utils::Scalar &z, const biorbd::utils::String &name, const biorbd::utils::String &parentName) | |
| Construct a wrapping object. More... | |
| WrappingObject (const biorbd::utils::Vector3d &other) | |
| Construct a wrapping object from 3d Vector. More... | |
| WrappingObject (const biorbd::utils::Vector3d &other, const biorbd::utils::String &name, const biorbd::utils::String &parentName) | |
| Construct a wrapping object. More... | |
| void | DeepCopy (const biorbd::muscles::WrappingObject &other) |
| Deep copy of the wrapping ibject in another wrapping object. More... | |
| virtual void | wrapPoints (const biorbd::utils::RotoTrans &rt, const biorbd::utils::Vector3d &p1_bone, const biorbd::utils::Vector3d &p2_bone, biorbd::utils::Vector3d &p1, biorbd::utils::Vector3d &p2, biorbd::utils::Scalar *muscleLength=nullptr)=0 |
| From the position of the wrapping object, return the 2 locations where the muscle leaves the wrapping object. More... | |
| virtual void | wrapPoints (biorbd::rigidbody::Joints &model, const biorbd::rigidbody::GeneralizedCoordinates &Q, const biorbd::utils::Vector3d &p1_bone, const biorbd::utils::Vector3d &p2_bone, biorbd::utils::Vector3d &p1, biorbd::utils::Vector3d &p2, biorbd::utils::Scalar *muscleLength=nullptr)=0 |
| From the position of the wrapping object, return the 2 locations where the muscle leaves the wrapping object. More... | |
| virtual void | wrapPoints (biorbd::utils::Vector3d &p1, biorbd::utils::Vector3d &p2, biorbd::utils::Scalar *muscleLength=nullptr)=0 |
| Returns the previously computed 2 locations where the muscle leaves the wrapping object. More... | |
| virtual const biorbd::utils::RotoTrans & | RT (biorbd::rigidbody::Joints &model, const biorbd::rigidbody::GeneralizedCoordinates &Q, bool updateKin=true)=0 |
| Return the RotoTrans matrix of the wrapping object. More... | |
| const biorbd::utils::RotoTrans & | RT () const |
| Return the RotoTrans matrix of the wrapping object. More... | |
| biorbd::muscles::WrappingObject & | operator= (const biorbd::utils::Vector3d &other) |
| To be able to use the equal "=" operator to define wrapping object. More... | |
 Public Member Functions inherited from biorbd::utils::Vector3d Public Member Functions inherited from biorbd::utils::Vector3d | |
| Vector3d () | |
| Construct 3D vector. More... | |
| Vector3d (const biorbd::utils::Scalar &x, const biorbd::utils::Scalar &y, const biorbd::utils::Scalar &z) | |
| Construct 3D vector. More... | |
| Vector3d (const biorbd::utils::Scalar &x, const biorbd::utils::Scalar &y, const biorbd::utils::Scalar &z, const biorbd::utils::String &name, const biorbd::utils::String &parentName) | |
| Construct a 3D vector. More... | |
| Vector3d (const biorbd::utils::Vector3d vec, const biorbd::utils::String &name, const biorbd::utils::String &parentName) | |
| Construct a 3D vector. More... | |
| Vector3d (const RigidBodyDynamics::Math::Vector3d &other) | |
| Construct a 3D vector from a Casadi 3D vector (drop the trailling 1) More... | |
| Vector3d (const RigidBodyDynamics::Math::VectorNd &other) | |
| Construct a 3D vector from a Casadi ND vector (drop the trailling 1) More... | |
| Vector3d (const RigidBodyDynamics::Math::Vector4d &other) | |
| Construct a 3D vector from an eigen 4D vector (drop the trailling 1) More... | |
| biorbd::utils::Vector3d | DeepCopy () const |
| Deep copy of a 3D vector. More... | |
| void | DeepCopy (const biorbd::utils::Vector3d &other) |
| Deep copy of a 3D vector into another 3D vector. More... | |
| biorbd::utils::Vector3d | applyRT (const RotoTrans &rt) const |
| Apply a RotoTrans to the 3D vector. More... | |
| void | applyRT (const RotoTrans &rt) |
| Apply a RotoTrans to the 3D vector. More... | |
| Public Member Functions inherited from biorbd::utils::Node | |
| Node () | |
| Construct Node. | |
| Node (const biorbd::utils::Node &other) | |
| Construct Node from another node. More... | |
| Node (const biorbd::utils::String &name) | |
| Construct Node. More... | |
| Node (const biorbd::utils::String &name, const biorbd::utils::String &parentName) | |
| Construct Node. More... | |
| virtual | ~Node () |
| Destroy class properly. | |
| void | DeepCopy (const biorbd::utils::Node &other) |
| Deep copy of the node in another node. More... | |
| void | setName (const biorbd::utils::String &name) |
| Set the name of the node. More... | |
| const biorbd::utils::String & | name () const |
| Return the name of the node. | |
| const biorbd::utils::String & | parent () const |
| Return the parent name of the node. | |
| void | setParent (const biorbd::utils::String &name) |
| Set the parent name of the node. More... | |
| biorbd::utils::NODE_TYPE | typeOfNode () const |
| Return the type of node. | |
Protected Attributes | |
| std::shared_ptr< biorbd::utils::RotoTrans > | m_RT |
| RotoTrans matrix of the wrapping object. | |
| Protected Attributes inherited from biorbd::utils::Node | |
| std::shared_ptr< biorbd::utils::String > | m_name |
| The name of the node. | |
| std::shared_ptr< biorbd::utils::String > | m_parentName |
| The parent name of the node. | |
| std::shared_ptr< biorbd::utils::NODE_TYPE > | m_typeOfNode |
| The type of the node. | |
Additional Inherited Members | |
| Protected Member Functions inherited from biorbd::utils::Vector3d | |
| void | setType () |
| Set the type Vector3d. | |
Detailed Description
Base class for the wrapping objects.
Definition at line 22 of file WrappingObject.h.
Constructor & Destructor Documentation
◆ WrappingObject() [1/4]
| biorbd::muscles::WrappingObject::WrappingObject | ( | const biorbd::utils::Scalar & | x, |
| const biorbd::utils::Scalar & | y, | ||
| const biorbd::utils::Scalar & | z | ||
| ) |
Construct a wrapping object.
- Parameters
-
x X-Component of the wrapping object y Y-Component of the wrapping object z Z-Component of the wrapping object
Definition at line 14 of file WrappingObject.cpp.
◆ WrappingObject() [2/4]
| biorbd::muscles::WrappingObject::WrappingObject | ( | const biorbd::utils::Scalar & | x, |
| const biorbd::utils::Scalar & | y, | ||
| const biorbd::utils::Scalar & | z, | ||
| const biorbd::utils::String & | name, | ||
| const biorbd::utils::String & | parentName | ||
| ) |
Construct a wrapping object.
- Parameters
-
x X-Component of the wrapping object y Y-Component of the wrapping object z Z-Component of the wrapping object name Name of the wrapping object parentName Name of the parent segment
Definition at line 24 of file WrappingObject.cpp.
◆ WrappingObject() [3/4]
| biorbd::muscles::WrappingObject::WrappingObject | ( | const biorbd::utils::Vector3d & | other | ) |
Construct a wrapping object from 3d Vector.
- Parameters
-
other The 3d vector
Definition at line 36 of file WrappingObject.cpp.
◆ WrappingObject() [4/4]
| biorbd::muscles::WrappingObject::WrappingObject | ( | const biorbd::utils::Vector3d & | other, |
| const biorbd::utils::String & | name, | ||
| const biorbd::utils::String & | parentName | ||
| ) |
Construct a wrapping object.
- Parameters
-
other Eigen vector name Name of the wrapping object parentName Name of the parent segment
Definition at line 43 of file WrappingObject.cpp.
Member Function Documentation
◆ DeepCopy()
| void biorbd::muscles::WrappingObject::DeepCopy | ( | const biorbd::muscles::WrappingObject & | other | ) |
Deep copy of the wrapping ibject in another wrapping object.
- Parameters
-
other The wrapping object to copy
Definition at line 52 of file WrappingObject.cpp.
◆ operator=()
|
inline |
To be able to use the equal "=" operator to define wrapping object.
- Parameters
-
other The 3d node to define the wrapping object
Definition at line 148 of file WrappingObject.h.
◆ RT() [1/2]
| const biorbd::utils::RotoTrans & biorbd::muscles::WrappingObject::RT | ( | ) | const |
Return the RotoTrans matrix of the wrapping object.
- Returns
- The RotoTrans matrix of the wrapping object
Definition at line 58 of file WrappingObject.cpp.
◆ RT() [2/2]
|
pure virtual |
Return the RotoTrans matrix of the wrapping object.
- Parameters
-
model The joint model Q The generalized coordinates updateKin If the kinematics should be computed
- Returns
- The RotoTrans matrix of the wrapping object
Implemented in biorbd::muscles::WrappingCylinder, and biorbd::muscles::WrappingSphere.
◆ wrapPoints() [1/3]
|
pure virtual |
From the position of the wrapping object, return the 2 locations where the muscle leaves the wrapping object.
- Parameters
-
model The joint model Q The generalized coordinates p1_bone 1st position of the muscle node p2_bone 2n position of the muscle node p1 The 1st position on the wrapping object the muscle leave p2 The 2nd position on the wrapping object the muscle leave muscleLength Length of the muscle (ignored if no value is provided)
Implemented in biorbd::muscles::WrappingCylinder, and biorbd::muscles::WrappingSphere.
◆ wrapPoints() [2/3]
|
pure virtual |
Returns the previously computed 2 locations where the muscle leaves the wrapping object.
- Parameters
-
p1 The 1st position on the wrapping object the muscle leave p2 The 2nd position on the wrapping object the muscle leave muscleLength Length of the muscle (ignored if no value is provided)
Implemented in biorbd::muscles::WrappingCylinder, and biorbd::muscles::WrappingSphere.
◆ wrapPoints() [3/3]
|
pure virtual |
From the position of the wrapping object, return the 2 locations where the muscle leaves the wrapping object.
- Parameters
-
rt RotoTrans matrix of the wrapping object p1_bone 1st position of the muscle node p2_bone 2n position of the muscle node p1 The 1st position on the wrapping object the muscle leave p2 The 2nd position on the wrapping object the muscle leave muscleLength Length of the muscle (ignored if no value is provided)
Implemented in biorbd::muscles::WrappingCylinder, and biorbd::muscles::WrappingSphere.
The documentation for this class was generated from the following files:
