Cylinder object that makes the muscle to wrap around. More...
#include <WrappingCylinder.h>
Classes | |
| class | NodeMusclePair |
| Pair of 2 muscles points. More... | |
Public Member Functions | |
| WrappingCylinder () | |
| Construct a wrapping cylinder. | |
| WrappingCylinder (const biorbd::utils::RotoTrans &rt, const biorbd::utils::Scalar &diameter, const biorbd::utils::Scalar &length, bool isCylinderPositiveSign) | |
| Construct a wrapping cylinder. More... | |
| WrappingCylinder (const biorbd::utils::RotoTrans &rt, const biorbd::utils::Scalar &diameter, const biorbd::utils::Scalar &length, bool isCylinderPositiveSign, const biorbd::utils::String &name, const biorbd::utils::String &parentName) | |
| Construct a wrapping cylinder. More... | |
| biorbd::muscles::WrappingCylinder | DeepCopy () const |
| Deep copy of the wrapping cylinder. More... | |
| void | DeepCopy (const biorbd::muscles::WrappingCylinder &other) |
| Deep copy of the wrapping cylinder in another wrapping cylinder. More... | |
| void | wrapPoints (const biorbd::utils::RotoTrans &rt, const biorbd::utils::Vector3d &p1_bone, const biorbd::utils::Vector3d &p2_bone, biorbd::utils::Vector3d &p1, biorbd::utils::Vector3d &p2, biorbd::utils::Scalar *length=nullptr) |
| From the position of the cylinder, return the 2 locations where the muscle leaves the wrapping object. More... | |
| void | wrapPoints (biorbd::rigidbody::Joints &model, const biorbd::rigidbody::GeneralizedCoordinates &Q, const biorbd::utils::Vector3d &p1_bone, const biorbd::utils::Vector3d &p2_bone, biorbd::utils::Vector3d &p1, biorbd::utils::Vector3d &p2, biorbd::utils::Scalar *length=nullptr) |
| From the position of the cylinder, return the 2 locations where the muscle leaves the wrapping object. More... | |
| void | wrapPoints (biorbd::utils::Vector3d &p1, biorbd::utils::Vector3d &p2, biorbd::utils::Scalar *length=nullptr) |
| Returns the previously computed 2 locations where the muscle leaves the wrapping object. More... | |
| virtual const biorbd::utils::RotoTrans & | RT (biorbd::rigidbody::Joints &model, const biorbd::rigidbody::GeneralizedCoordinates &Q, bool updateKin=true) |
| Return the RotoTrans matrix of the cylinder. More... | |
| void | setDiameter (const biorbd::utils::Scalar &val) |
| Set the diameter of the wrapping cylinder. More... | |
| const biorbd::utils::Scalar & | diameter () const |
| Return the diameter of the cylinder. More... | |
| biorbd::utils::Scalar | radius () const |
| Return the radius of the cylinder. More... | |
| void | setLength (const biorbd::utils::Scalar &val) |
| Set the length of the cylinder. More... | |
| const biorbd::utils::Scalar & | length () const |
| Return the length of the cylinder. More... | |
 Public Member Functions inherited from biorbd::muscles::WrappingObject Public Member Functions inherited from biorbd::muscles::WrappingObject | |
| WrappingObject () | |
| Construct a wrapping object. | |
| WrappingObject (const biorbd::utils::Scalar &x, const biorbd::utils::Scalar &y, const biorbd::utils::Scalar &z) | |
| Construct a wrapping object. More... | |
| WrappingObject (const biorbd::utils::Scalar &x, const biorbd::utils::Scalar &y, const biorbd::utils::Scalar &z, const biorbd::utils::String &name, const biorbd::utils::String &parentName) | |
| Construct a wrapping object. More... | |
| WrappingObject (const biorbd::utils::Vector3d &other) | |
| Construct a wrapping object from 3d Vector. More... | |
| WrappingObject (const biorbd::utils::Vector3d &other, const biorbd::utils::String &name, const biorbd::utils::String &parentName) | |
| Construct a wrapping object. More... | |
| void | DeepCopy (const biorbd::muscles::WrappingObject &other) |
| Deep copy of the wrapping ibject in another wrapping object. More... | |
| const biorbd::utils::RotoTrans & | RT () const |
| Return the RotoTrans matrix of the wrapping object. More... | |
| biorbd::muscles::WrappingObject & | operator= (const biorbd::utils::Vector3d &other) |
| To be able to use the equal "=" operator to define wrapping object. More... | |
| Public Member Functions inherited from biorbd::utils::Vector3d | |
| Vector3d () | |
| Construct 3D vector. More... | |
| Vector3d (const biorbd::utils::Scalar &x, const biorbd::utils::Scalar &y, const biorbd::utils::Scalar &z) | |
| Construct 3D vector. More... | |
| Vector3d (const biorbd::utils::Scalar &x, const biorbd::utils::Scalar &y, const biorbd::utils::Scalar &z, const biorbd::utils::String &name, const biorbd::utils::String &parentName) | |
| Construct a 3D vector. More... | |
| Vector3d (const biorbd::utils::Vector3d vec, const biorbd::utils::String &name, const biorbd::utils::String &parentName) | |
| Construct a 3D vector. More... | |
| Vector3d (const RigidBodyDynamics::Math::Vector3d &other) | |
| Construct a 3D vector from a Casadi 3D vector (drop the trailling 1) More... | |
| Vector3d (const RigidBodyDynamics::Math::VectorNd &other) | |
| Construct a 3D vector from a Casadi ND vector (drop the trailling 1) More... | |
| Vector3d (const RigidBodyDynamics::Math::Vector4d &other) | |
| Construct a 3D vector from an eigen 4D vector (drop the trailling 1) More... | |
| biorbd::utils::Vector3d | DeepCopy () const |
| Deep copy of a 3D vector. More... | |
| void | DeepCopy (const biorbd::utils::Vector3d &other) |
| Deep copy of a 3D vector into another 3D vector. More... | |
| biorbd::utils::Vector3d | applyRT (const RotoTrans &rt) const |
| Apply a RotoTrans to the 3D vector. More... | |
| void | applyRT (const RotoTrans &rt) |
| Apply a RotoTrans to the 3D vector. More... | |
| Public Member Functions inherited from biorbd::utils::Node | |
| Node () | |
| Construct Node. | |
| Node (const biorbd::utils::Node &other) | |
| Construct Node from another node. More... | |
| Node (const biorbd::utils::String &name) | |
| Construct Node. More... | |
| Node (const biorbd::utils::String &name, const biorbd::utils::String &parentName) | |
| Construct Node. More... | |
| virtual | ~Node () |
| Destroy class properly. | |
| void | DeepCopy (const biorbd::utils::Node &other) |
| Deep copy of the node in another node. More... | |
| void | setName (const biorbd::utils::String &name) |
| Set the name of the node. More... | |
| const biorbd::utils::String & | name () const |
| Return the name of the node. | |
| const biorbd::utils::String & | parent () const |
| Return the parent name of the node. | |
| void | setParent (const biorbd::utils::String &name) |
| Set the parent name of the node. More... | |
| biorbd::utils::NODE_TYPE | typeOfNode () const |
| Return the type of node. | |
Protected Member Functions | |
| void | findTangentToCircle (const biorbd::utils::Vector3d &p, biorbd::utils::Vector3d &p_tan) const |
| Find the two tangents of a point with a circle. More... | |
| void | selectTangents (const NodeMusclePair &p, biorbd::utils::Vector3d &p_tan) const |
| Select between a set of nodes which ones to keep. More... | |
| bool | findVerticalNode (const NodeMusclePair &pointsInGlobal, NodeMusclePair &pointsToWrap) const |
| Find the height of both points. More... | |
| bool | checkIfWraps (const NodeMusclePair &pointsInGlobal, NodeMusclePair &pointsToWrap) const |
| Check if a wrapper has to be done. More... | |
| biorbd::utils::Scalar | computeLength (const NodeMusclePair &p) const |
| Compute the muscle length on the cylinder. More... | |
| Protected Member Functions inherited from biorbd::utils::Vector3d | |
| void | setType () |
| Set the type Vector3d. | |
Protected Attributes | |
| std::shared_ptr< biorbd::utils::Scalar > | m_dia |
| Diameter of the cylinder diametre du cylindre. | |
| std::shared_ptr< biorbd::utils::Scalar > | m_length |
| Length of the cylinder. | |
| std::shared_ptr< bool > | m_isCylinderPositiveSign |
| orientation of the muscle passing | |
| std::shared_ptr< biorbd::utils::RotoTrans > | m_RTtoParent |
| RotoTrans matrix with the parent. | |
| std::shared_ptr< biorbd::utils::Vector3d > | m_p1Wrap |
| First point of contact with the wrap. | |
| std::shared_ptr< biorbd::utils::Vector3d > | m_p2Wrap |
| Second point of contact with the wrap. | |
| std::shared_ptr< biorbd::utils::Scalar > | m_lengthAroundWrap |
| Length between p1 and p2. | |
| Protected Attributes inherited from biorbd::muscles::WrappingObject | |
| std::shared_ptr< biorbd::utils::RotoTrans > | m_RT |
| RotoTrans matrix of the wrapping object. | |
| Protected Attributes inherited from biorbd::utils::Node | |
| std::shared_ptr< biorbd::utils::String > | m_name |
| The name of the node. | |
| std::shared_ptr< biorbd::utils::String > | m_parentName |
| The parent name of the node. | |
| std::shared_ptr< biorbd::utils::NODE_TYPE > | m_typeOfNode |
| The type of the node. | |
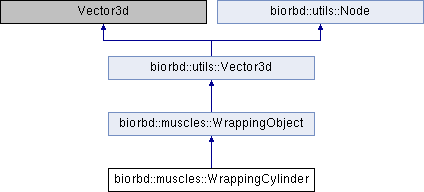
Detailed Description
Cylinder object that makes the muscle to wrap around.
Definition at line 12 of file WrappingCylinder.h.
Constructor & Destructor Documentation
◆ WrappingCylinder() [1/2]
| biorbd::muscles::WrappingCylinder::WrappingCylinder | ( | const biorbd::utils::RotoTrans & | rt, |
| const biorbd::utils::Scalar & | diameter, | ||
| const biorbd::utils::Scalar & | length, | ||
| bool | isCylinderPositiveSign | ||
| ) |
Construct a wrapping cylinder.
- Parameters
-
rt RotoTrans matrix of the origin of the cylinder diameter Diameter of the cylinder length Length of the cylinder isCylinderPositiveSign If cylinder is of positive sign
Definition at line 21 of file WrappingCylinder.cpp.
◆ WrappingCylinder() [2/2]
| biorbd::muscles::WrappingCylinder::WrappingCylinder | ( | const biorbd::utils::RotoTrans & | rt, |
| const biorbd::utils::Scalar & | diameter, | ||
| const biorbd::utils::Scalar & | length, | ||
| bool | isCylinderPositiveSign, | ||
| const biorbd::utils::String & | name, | ||
| const biorbd::utils::String & | parentName | ||
| ) |
Construct a wrapping cylinder.
- Parameters
-
rt RotoTrans matrix diameter Diameter of the cylinder length Length of the cylinder isCylinderPositiveSign If cylinder is of positive sign name The name of the cylinder parentName The parent name segment
Definition at line 38 of file WrappingCylinder.cpp.
Member Function Documentation
◆ checkIfWraps()
|
protected |
Check if a wrapper has to be done.
- Parameters
-
pointsInGlobal The position of the muscle pair in global reference frame pointsToWrap The points to wrap
- Returns
- If the wrapper has to be done
Definition at line 311 of file WrappingCylinder.cpp.
◆ computeLength()
|
protected |
Compute the muscle length on the cylinder.
- Parameters
-
p the muscle node pair
- Returns
- The muscle lengh on the cylinder
Definition at line 353 of file WrappingCylinder.cpp.
◆ DeepCopy() [1/2]
| biorbd::muscles::WrappingCylinder biorbd::muscles::WrappingCylinder::DeepCopy | ( | ) | const |
Deep copy of the wrapping cylinder.
- Returns
- A deep copy of the wrapping cylinder
Definition at line 57 of file WrappingCylinder.cpp.
◆ DeepCopy() [2/2]
| void biorbd::muscles::WrappingCylinder::DeepCopy | ( | const biorbd::muscles::WrappingCylinder & | other | ) |
Deep copy of the wrapping cylinder in another wrapping cylinder.
- Parameters
-
other The wrapping cylinder to copy
Definition at line 64 of file WrappingCylinder.cpp.
◆ diameter()
| const biorbd::utils::Scalar & biorbd::muscles::WrappingCylinder::diameter | ( | ) | const |
Return the diameter of the cylinder.
- Returns
- The diameter of the cylinder
Definition at line 164 of file WrappingCylinder.cpp.
◆ findTangentToCircle()
|
protected |
Find the two tangents of a point with a circle.
- Parameters
-
p The point p_tan The point tangent
Definition at line 185 of file WrappingCylinder.cpp.
◆ findVerticalNode()
|
protected |
Find the height of both points.
- Parameters
-
pointsInGlobal The position of the muscle pair in global reference frame pointsToWrap The points to wrap
- Returns
- Return false if no wrap is needed
Definition at line 235 of file WrappingCylinder.cpp.
◆ length()
| const biorbd::utils::Scalar & biorbd::muscles::WrappingCylinder::length | ( | ) | const |
Return the length of the cylinder.
- Returns
- The length of the cylinder
Definition at line 180 of file WrappingCylinder.cpp.
◆ radius()
| biorbd::utils::Scalar biorbd::muscles::WrappingCylinder::radius | ( | ) | const |
Return the radius of the cylinder.
- Returns
- The radius of the cylinder
Definition at line 169 of file WrappingCylinder.cpp.
◆ RT()
|
virtual |
Return the RotoTrans matrix of the cylinder.
- Parameters
-
model The joint model Q The generalized coordinates updateKin If the kinematics should be computed
- Returns
- The RotoTrans matrix of the cylinder
Implements biorbd::muscles::WrappingObject.
Definition at line 144 of file WrappingCylinder.cpp.
◆ selectTangents()
|
protected |
Select between a set of nodes which ones to keep.
- Parameters
-
p The 2 muscles points p_tan The selected point
Definition at line 207 of file WrappingCylinder.cpp.
◆ setDiameter()
| void biorbd::muscles::WrappingCylinder::setDiameter | ( | const biorbd::utils::Scalar & | val | ) |
Set the diameter of the wrapping cylinder.
- Parameters
-
val Value of the diameter to set
Definition at line 158 of file WrappingCylinder.cpp.
◆ setLength()
| void biorbd::muscles::WrappingCylinder::setLength | ( | const biorbd::utils::Scalar & | val | ) |
Set the length of the cylinder.
- Parameters
-
val Value of the to set
Definition at line 174 of file WrappingCylinder.cpp.
◆ wrapPoints() [1/3]
|
virtual |
From the position of the cylinder, return the 2 locations where the muscle leaves the wrapping object.
- Parameters
-
model The joint model Q The generalized coordinates p1_bone 1st position of the muscle node p2_bone 2n position of the muscle node p1 The 1st position on the cylinder the muscle leave p2 The 2nd position on the cylinder the muscle leave length Length of the muscle (ignored if no value is provided)
Implements biorbd::muscles::WrappingObject.
Definition at line 121 of file WrappingCylinder.cpp.
◆ wrapPoints() [2/3]
|
virtual |
Returns the previously computed 2 locations where the muscle leaves the wrapping object.
- Parameters
-
p1 The 1st position on the cylinder the muscle leave p2 The 2nd position on the cylinder the muscle leave length Length of the muscle (ignored if no value is provided)
Implements biorbd::muscles::WrappingObject.
Definition at line 134 of file WrappingCylinder.cpp.
◆ wrapPoints() [3/3]
|
virtual |
From the position of the cylinder, return the 2 locations where the muscle leaves the wrapping object.
- Parameters
-
rt RotoTrans matrix of the cylinder p1_bone 1st position of the muscle node p2_bone 2n position of the muscle node p1 The 1st position on the cylinder the muscle leave p2 The 2nd position on the cylinder the muscle leave length Length of the muscle (ignored if no value is provided)
Implements biorbd::muscles::WrappingObject.
Definition at line 76 of file WrappingCylinder.cpp.
The documentation for this class was generated from the following files:
